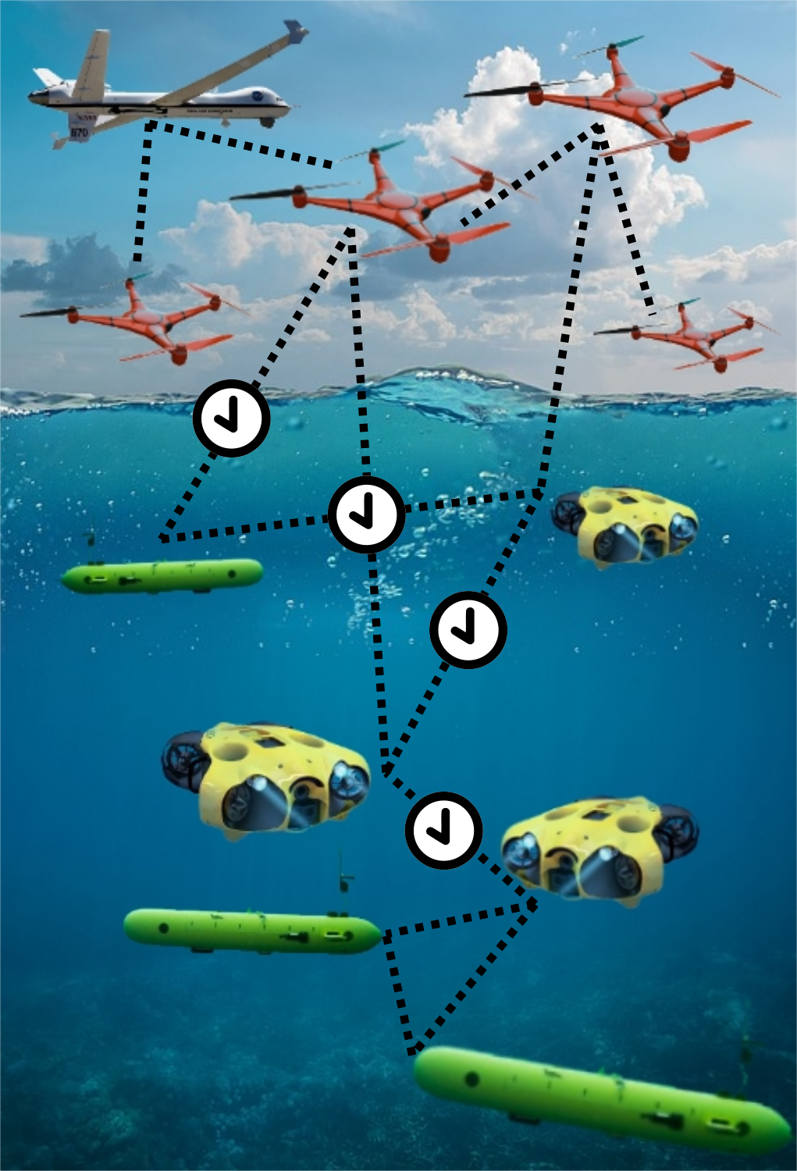
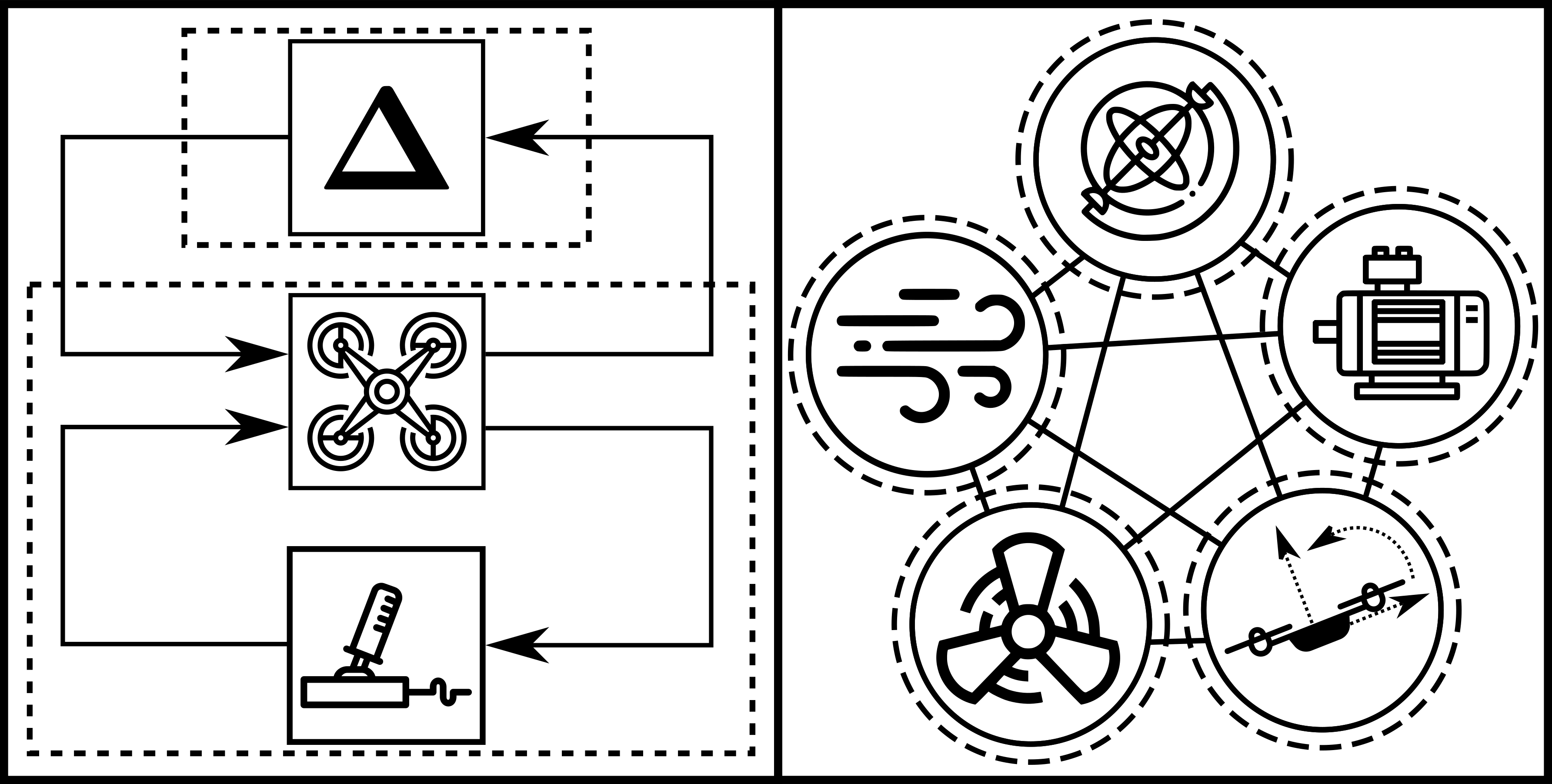
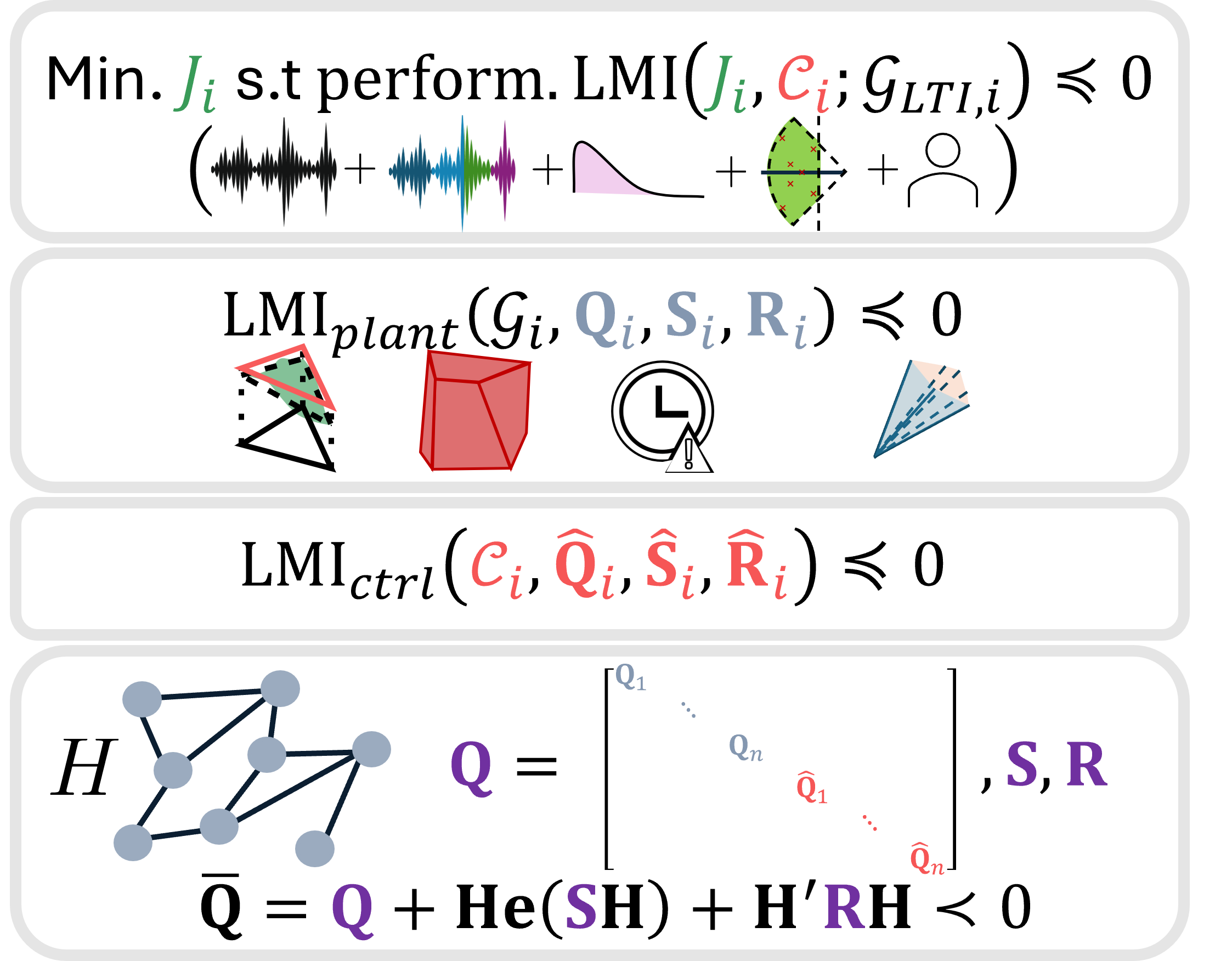
This work aims to develop novel control schemes that will allow large groups of heterogeneous, autonomous agents to collaborate. This exploits on a shift in perspective on robust control from traditional ℋ∞ analysis, which lumps diverse sources of uncertainty and requires closed-loop analysis, to using Networked Dissipativity Theorems that use open-loop analysis to assess closed-loop stability. This perspective shift naturally facilitates designs with heterogenous agents that scale well as networks grow. This inherently breaks up the large-scale stability analysis problem into smaller, more tractable subproblems. Moreover, it means each subsystem can be analyzed individually, so you can tailor your modelling, data-collection, and objectives to each one individually. Key contributions have developed synthesis and analysis methods that assure stability of networks of interconnected heterogeneous systems.
Image
| Image
|
Distributed control of swarm drones.